 МАТЕРИАЛЫ Обзоры Современные рулевые системы
МАТЕРИАЛЫ Обзоры Современные рулевые системыСовременные рулевые системы

Вывернутся всегда!
|
|
||||||||||

В последнее время все большую популярность набирают автомобили компакт-класса. Такая тенденция вполне объяснима — попробуйте припарковаться посреди рабочего дня где-нибудь в центре практически любого крупного города России. В такой ситуации владельцы внедорожников и больших легковых автомобилей чувствуют себя немного неполноценными, когда какая-нибудь дама на своей «Оке» стоимостью 1000 долларов свободно паркуется в такую дырку, в которую ваш автомобиль можно поместить только с помощью подъемного крана.
К сожалению, если речь идет об автомобильной промышленности, мы очень редко можем набрать воздуха в грудь и испытать чувство гордости за нашу страну. Но это как раз тот случай, ведь когда у нас стали появляться электроусилители в качестве допоборудования, модели иностранных машин, оснащенных ЭУРом, можно было пересчитать по пальцам. Причем по качеству изготовления, надежности, качеству работы этот узел и сейчас не ударит в грязь лицом перед иностранными коллегами, стоимость же его с установкой сейчас в 2-3 раза ниже, чем гидроусилителя, к тому же можно сэкономить, установив узел самому — процедура займет порядка двух часов, а стоимость ограничится 600 долларами.
Всем хороши эти устройства, однако главной задачи — кардинально увеличить маневренность — они не решают. В данной ситуации приоритетной целью должно быть снижение радиуса разворота автомобиля. Здесь есть два возможных пути решения. Первый путь — это увеличить максимальный угол поворота передних колес. Действительно, на первый взгляд самый простой и логичный выход, но на самом деле это не так. Максимальный угол поворота передних колес зачастую ограничен не только параметрами рулевой системы, но и силовыми связями, форматом колесных ниш и так далее, в некоторых случаях для увеличения этого самого угла необходимо пересматривать силовую структуру передней части кузова, а это и вовсе не простая задача. Во-вторых, большие углы поворота колес требуют маленького передаточного отношения рулевого механизма, иначе при движении на низких скоростях или при парковке на баранку придется буквально наматываться, как это делают рулевые на океанском лайнере. Если же сделать то самое маленькое передаточное отношение рулевого механизма, которое так нам необходимо на небольших скоростях, то при движении на большой скорости машина будет вести себя очень нервно, шарахаясь из стороны в сторону при малейшем отклонении рулевого колеса от нулевого положения.
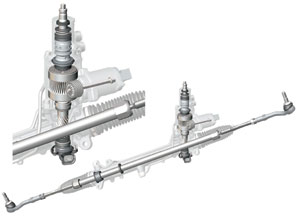
Но и здесь не стоит забывать, что данная проблема интересует всех уже давно, и настройка рулевого механизма всегда является неким компромиссным решением, далеко не всегда идеальным. Но, как говорится, рыба ищет где глубже, а мы вернемся к нашим рулевым системам. Итак, мы потихоньку приходим к тому, что на наш автомобиль хорошо бы установить некое устройство, меняющее передаточное отношение рулевого механизма в зависимости от режима движения автомобиля. Первые рулевые механизмы с переменным передаточным отношением работали следующим образом: при небольшом отклонении руля от нулевой отметки (аналогичные движения водитель совершает при движении и перестроении на высокой скорости) рулевая рейка работает с большим передаточным отношением, и в этом случае автомобиль не шарахается на другую полосу при малейших колебаниях баранки. В то же время если руль поворачивается на большой угол, то начинают работать шестерни с большим шагом зубьев, а передаточное число всего рулевого механизма падает, повышая чувствительность, что при наличии усилителя рулевого управления серьезно облегчает маневрирование и парковку. Такая конструкция оставалась единственным вариантом до тех пор, пока технологический уровень и уровень надежности электронного оборудования не достигли той отметки, когда его можно глубоко внедрять в рулевое управление автомобиля и доверять ему важные функции. Так вот, как только это стало возможным, сразу же производители стали предлагать рулевые системы, в которых передаточное отношение меняется по команде электроники, которая, в свою очередь, опирается на скорость движения автомобиля, угол поворота рулевого колеса и так далее.
Так вот если возникает такая
ситуация и электроника регистрирует поперечные
смещения автомобиля (или изменения курса)
при неизменном положении рулевого колеса,
то автомобиль самостоятельно поворачивает
передние колеса на угол, необходимый для
того, чтобы исправить ситуацию, но не превышающий
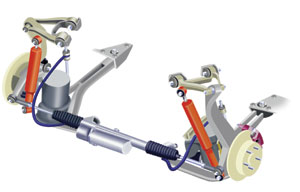
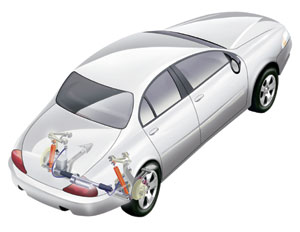
3 градуса. За этими сложными и дорогостоящими конструкциями незаслуженно забывается одно очень элегантное решение, которое не намного проще или дешевле, но вместе с тем позволяет добиться результатов гораздо более высоких, чем с вышеописанными конструкциями. Речь идет об автомобилях, у которых управляемой является не только передняя ось, но и задняя. Внедрение такой конструкции позволяет автомобилю действительно выйти на тот уровень ходовых качеств, когда крупный американский внедорожник будет вертеться в тесных переулках, как микролитражка, а на трассе иметь высокую курсовую устойчивость при резких маневрах и перестроениях на высокой скорости. Как этого добиться? Очень просто — необходимо использовать системы поворота четырех колес в двух основных режимах. Первый — так называемый городской режим. В этом случае задние колеса автомобиля будут поворачиваться в сторону, противоположную передним. Таким образом, рулевое управление будет иметь высокую чувствительность, строго говоря, теперь не надо будет наматывать баранку при парковке, а радиус разворота сократится на 20 и более процентов!
Но что хорошо русскому, немцу смерть, а точнее с таким рулевым управлением на трассе не езда, а мучение! На малейшие отклонения руля автомобиль будет резко реагировать, бросаясь из стороны в сторону, а поворот баранки на значительный угол, который в обычном автомобиле вызвал бы лишь неприятные ощущения, здесь может спровоцировать неконтролируемое скольжение автомобиля. Здесь-то и приходит на выручку второй режим работы системы, суть которого состоит в том, что задние колеса поворачиваются в ту же сторону, что и передние, но, естественно, на меньший угол. Конечная величина угла поворота задних колес зависит от угла поворота передних и скорости движения автомобиля: выше скорость — больше угол поворота задних колес. Таким образом, высокая чувствительность рулевого управления, которая вредна на высоких скоростях, снижается, и соответственно повышается стабильность движения на высоких скоростях.
Однако такие метаморфозы стали возможны только недавно, когда обозначился бум внедрения электроники в конструкцию автомобиля. Но история систем поворота четырех колес началась еще раньше...
Попытки оснастить автомобиль системами поворота четырех и более колес предпринимались еще на заре автомобилестроения, так первое упоминание о таких системах датировано в 1901 годом. В этом году увидел свет паромобиль, в котором была применена механическая система поворота задних колес автомобиля. Уже тогда конструкторы осознавали весь потенциал таких систем, однако низкий уровень технического развития в то время не позволял наладить их выпуск, да и особой надобности не было, ведь дороги в большинстве своем просто отсутствовали, скорости были невысокими, а уж с парковкой точно проблем не было. Так или иначе, но до поры до времени эти системы существовали в основном в умах инженеров и конструкторов, а не на конкретных автомобилях.
Более продвинутая и сложная конструкция была использована в автомобиле MAZDA 626. Данная система имеет довольно сложный алгоритм работы, и ей присуще большое количество исполнительных и сервисных устройств. Алгоритм работы системы подразумевает два режима работы: при движении на скорости меньше 35 км/ч задние колеса автомобиля поворачиваются в противоположную сторону от передних; при движении на скорости больше 35 км/ч задние колеса автомобиля поворачиваются в ту же сторону, что и передние. Кроме того, система в зависимости от скорости движения автомобиля меняет соотношение углов поворота передних/задних колес в достаточно широких пределах, с целью увеличения удобства и безопасности управления автомобилем. Максимальный угол поворота колес задней оси ограничен величиной 5° от их прямолинейного положения. Главной особенностью данной системы является то, что она сочетает в себе гидравлические, механические и электромеханические силовые связи. Описывая ее внутренности и компоненты, можно затратить не одну страницу текста, а для неподготовленного читателя этот опус может оказаться перегружен сложной технической информацией, поэтому мы воздержимся от этого. На сегодняшний день в данной области обозначилась условная классификация по типу и применяемости систем поворота четырех колес. 1) Механические системы — системы, в которых связь между передним и задним рулевым механизмом осуществляется с помощью тяг, карданных передач, валов и т.д. Данные системы сейчас находят применение в основном на специальной технике, такой как погрузчики, садовые тракторы. 2) Гидравлические системы. Здесь много общего можно найти с классическим гидроусилителем рулевого управления, а точнее: гидронасос поддерживает в контуре определенное давление рабочей жидкости, электронный блок в зависимости от скорости движения автомобиля и угла поворота руля подает команду на электромагнитные клапаны, которые, в свою очередь, открывают путь жидкости к силовому гидроцилиндру. Последний и отвечает непосредственно за поворот задних колес. Наиболее оптимальными объектами для применения таких систем являются большегрузные транспортные средства и тяжелая техника. 3) Электромеханические системы. Наиболее популярные на данный момент и наиболее перспективные. Главная деталь таких систем — электромеханический узел поворота, представляющий собой классическую рулевую рейку, у которой рулевой вал приводится в движение не мускульной силой водителя, а электродвигателем. Область применения данных систем практически не ограничена, но, конечно, для легкового автотранспорта это, как говорится, «то, что доктор прописал».
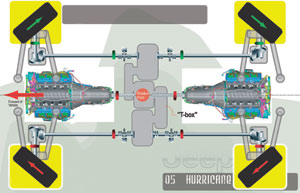
На февральском мотор-шоу в Детройте компания GM представила на суд всему миру интереснейший концепт-кар JEEP HURRICANE. Автомобиль представляет идеологию funny car — автомобиля для развлечений и серьезного внедорожника. Перечень инноваций, внедренных в данный автомобиль, необходимо начать с силовой установки, представляющей собой два восьмицилиндровых бензиновых двигателя суммарной мощностью 670 лошадиных сил, крутящий момент и вовсе поражает — 1004 Нм, такая величина еще недавно встречалась только в техническом описании тяжелых грузовиков. Хотя двигатели оснащены системой MDS отключения цилиндров для экономии топлива, про расход горючего остается просто догадываться. Глядя на эту махину, вспоминается один старый анекдот про оператора АЗС, кричащего водителю американского джипа: «Молодой человек, заглушите двигатель, а то вы не уедете!». Но нас интересует не диковинная силовая установка, не уникальная трансмиссия, а рулевая система. Вот уж точно венец творения! Мощная электроника, индивидуальные механизмы поворота на каждое колесо, отсутствие рулевой трапеции, карбоновая рама, 18 скоростей... извините — заговорился. Казалось бы, зачем городить такой огород? Отвечу вопросом на вопрос: как вам автомобиль с нулевым радиусом разворота? Скажете, невозможно? А вот и ничего подобного, вспомните гусеничную технику, если водитель включает тот режим трансмиссии, когда на разные борта подается разное направление вращение, то трактор (танк) крутится на месте, как волчок. Примерно то же самое происходит и здесь, с одним отличием: колеса разных бортов сводятся друг к другу таким образом, чтобы траектория их движения напоминала окружность, центр которой совпадает с геометрическим центром автомобиля. Кроме того, автомобиль способен сам выбирать и оперативно устанавливать уровень схождения колес в зависимости от режима движения. Жалко, что в ближайшем будущем такой системе не суждено стать массовым явлением, ведь к каждому колесу необходимо вести свой карданный вал с главной передачей, что просто сведет с ума специалистов-технологов, специалистов по эргономике, компоновке и пассивной безопасности. Другое дело электромобили с мотор-колесами — здесь вообще нет ограничений, впрочем, как и самих автомобилей. Будем ждать...
|
 Таков
извечный компромисс между различными потребительскими
качествами автомобилей: если хочешь максимального
комфорта и вместимости салона автомобиля,
мирись с трудностями парковки, хочешь залезать
в каждую дырку, тогда придется ездить в
маленькой коробчонке, не рассчитывая на
сверхкомфортное пребывание в салоне и большую
вместительность. Естественно, что эти факты
не остались незамеченными для автопроизводителей
— как только такая проблема остро обозначилась,
инженеры и конструкторы сразу стали предлагать
интересные технические решения, многие из
которых уже довольно давно серийно устанавливаются
на автомобилях. Основная идея большинства
инноваций в рулевом управлении, касающихся
повышения комфорта и безопасности вождения
автомобиля, — это разделение режимов управления
в зависимости от скорости движения автомобиля.
Таков
извечный компромисс между различными потребительскими
качествами автомобилей: если хочешь максимального
комфорта и вместимости салона автомобиля,
мирись с трудностями парковки, хочешь залезать
в каждую дырку, тогда придется ездить в
маленькой коробчонке, не рассчитывая на
сверхкомфортное пребывание в салоне и большую
вместительность. Естественно, что эти факты
не остались незамеченными для автопроизводителей
— как только такая проблема остро обозначилась,
инженеры и конструкторы сразу стали предлагать
интересные технические решения, многие из
которых уже довольно давно серийно устанавливаются
на автомобилях. Основная идея большинства
инноваций в рулевом управлении, касающихся
повышения комфорта и безопасности вождения
автомобиля, — это разделение режимов управления
в зависимости от скорости движения автомобиля.
 Одним
из первых шагов в направлении облегчения
трудозатрат водителя при парковке автомобиля
было внедрение гидравлического усилителя
рулевого управления — ГУРа, как его часто
называют. Первыми преимущества усилителей
оценили водители грузовых и спецмашин —
действительно попробуй поверни на месте
огромные катки самосвала. Со временем усилители
стали внедрять и в легковой автотранспорт,
и сейчас практически все автомобили иностранного
производства сходят с конвейера с рулевым
усилителем в стандартной комплектации. Что
уж тут говорить, ведь и отечественные автопроизводители
начали немного баловать наших автолюбителей
такой опцией (правда, за дополнительную
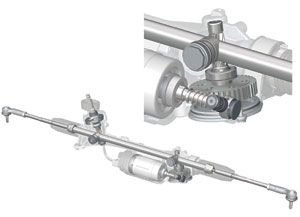
и весьма существенную плату). Конструкция
традиционного гидравлического усилителя
рулевого управления не претерпевала существенных
изменений в течение многих лет, и лишь появление
первых усилителей с электроприводом внесло
некоторое оживление в эту область.
Одним
из первых шагов в направлении облегчения
трудозатрат водителя при парковке автомобиля
было внедрение гидравлического усилителя
рулевого управления — ГУРа, как его часто
называют. Первыми преимущества усилителей
оценили водители грузовых и спецмашин —
действительно попробуй поверни на месте
огромные катки самосвала. Со временем усилители
стали внедрять и в легковой автотранспорт,
и сейчас практически все автомобили иностранного
производства сходят с конвейера с рулевым
усилителем в стандартной комплектации. Что
уж тут говорить, ведь и отечественные автопроизводители
начали немного баловать наших автолюбителей
такой опцией (правда, за дополнительную
и весьма существенную плату). Конструкция
традиционного гидравлического усилителя
рулевого управления не претерпевала существенных
изменений в течение многих лет, и лишь появление
первых усилителей с электроприводом внесло
некоторое оживление в эту область.
 Конечно,
здесь приходится утрировать — ведь колесят
сейчас по мировым дорогам миллионы автомобилей
без усилителей, электронных систем и прочих
атрибутов «автомобиля электронного», и ничего
страшного.
Конечно,
здесь приходится утрировать — ведь колесят
сейчас по мировым дорогам миллионы автомобилей
без усилителей, электронных систем и прочих
атрибутов «автомобиля электронного», и ничего
страшного.
 Более
того, в новейшем LEXUS GS 430 поворот передних
колес может осуществляться автоматически,
без какого-либо участия водителя! Ради справедливости
стоит сказать, что это происходит при строго
определенных условиях и лишь на малые углы,
но тенденция, мягко говоря, поражает. Данная
система заслуживает того, чтобы на ней остановиться
поподробнее. При движении в обычных условиях
поведение автомобиля ничем не отличается
от своих собратьев, естественно, с учетом
того, что это сверхсовременное авто бизнес-класса.
Весь потенциал электроники раскрывается,
когда автомобиль начинает тормозить по неоднородному
покрытию, например когда под колесами одного
борта находится снег, а другая пара опирается
на асфальтовое покрытие. В таких случаях
всегда имеет место неприятный эффект, когда
машину начинает довольно сильно тянуть в
сторону, где коэффициент сцепления колеса
с дорогой выше. Конечно, этот эффект не
смертельный, но философия современного автомобиля,
тем более бизнес- или люкс-класса, состоит
в том, чтобы максимально оградить водителя
от неприятных ощущений, возникающих из-за
плохой дорожной обстановки и так далее.
Более
того, в новейшем LEXUS GS 430 поворот передних
колес может осуществляться автоматически,
без какого-либо участия водителя! Ради справедливости
стоит сказать, что это происходит при строго
определенных условиях и лишь на малые углы,
но тенденция, мягко говоря, поражает. Данная
система заслуживает того, чтобы на ней остановиться
поподробнее. При движении в обычных условиях
поведение автомобиля ничем не отличается
от своих собратьев, естественно, с учетом
того, что это сверхсовременное авто бизнес-класса.
Весь потенциал электроники раскрывается,
когда автомобиль начинает тормозить по неоднородному
покрытию, например когда под колесами одного
борта находится снег, а другая пара опирается
на асфальтовое покрытие. В таких случаях
всегда имеет место неприятный эффект, когда
машину начинает довольно сильно тянуть в
сторону, где коэффициент сцепления колеса
с дорогой выше. Конечно, этот эффект не
смертельный, но философия современного автомобиля,
тем более бизнес- или люкс-класса, состоит
в том, чтобы максимально оградить водителя
от неприятных ощущений, возникающих из-за
плохой дорожной обстановки и так далее.

 Также система активизируется
и вносит необходимые поправки при сносе
передней оси и заносе задней, существенно
помогая штатной системе стабилизации.
Также система активизируется
и вносит необходимые поправки при сносе
передней оси и заносе задней, существенно
помогая штатной системе стабилизации.
 При
перестроении из ряда в ряд автомобиль больше
не шарахается в сторону, не поворачивает,
а просто сдвигается в соседнюю полосу. Радиус
поворота в таком случае резко возрастает,
что, если вспомнить автомобильную теорию,
ведет к снижению момента, вызывающего занос
задней оси.
При
перестроении из ряда в ряд автомобиль больше
не шарахается в сторону, не поворачивает,
а просто сдвигается в соседнюю полосу. Радиус
поворота в таком случае резко возрастает,
что, если вспомнить автомобильную теорию,
ведет к снижению момента, вызывающего занос
задней оси.

 Но
вот в конце 80-х годов на автомобильном
рынке появилось несколько моделей автомобилей,
оснащенных управляемой задней осью. Стоит
отметить, что практически все автомобили
были произведены в Стране восходящего солнца:
Mitsubishi Galant, Mitsubishi Sigma, Mazda
626, Honda Prelude, Toyota Celica — все
эти автомобили стали выпускаться в полноуправляемом
исполнении. Изощренность конструкций таких
систем удивляет даже сегодня, несмотря на
то что с момента разработки прошло порядка
20 лет. Естественно, что никаких тенденций
или схожести конструкций тогда не существовало,
а полноуправляемые системы различных производителей
можно было объединить лишь одним определением:
кто в лес, кто по дрова.
Но
вот в конце 80-х годов на автомобильном
рынке появилось несколько моделей автомобилей,
оснащенных управляемой задней осью. Стоит
отметить, что практически все автомобили
были произведены в Стране восходящего солнца:
Mitsubishi Galant, Mitsubishi Sigma, Mazda
626, Honda Prelude, Toyota Celica — все
эти автомобили стали выпускаться в полноуправляемом
исполнении. Изощренность конструкций таких
систем удивляет даже сегодня, несмотря на
то что с момента разработки прошло порядка
20 лет. Естественно, что никаких тенденций
или схожести конструкций тогда не существовало,
а полноуправляемые системы различных производителей
можно было объединить лишь одним определением:
кто в лес, кто по дрова.
 Компания
Honda разработала механическую систему,
которая устанавливалась на автомобили Honda
Prelude. Главной особенностью этой системы
было то, что она выполнена полностью механической
с весьма непростой кинематической схемой.
Работала она следующим образом: при повороте
руля на небольшие углы задние колеса поворачиваются
в ту же сторону, что и передние, снижая
чувствительность и повышая надежность и
стабильность движения. При повороте баранки
на значительный угол задние колеса поворачиваются
в противоположную к передним колесам сторону,
обеспечивая высокую маневренность автомобиля.
Недостатки такой конструкции следуют из
ее технических характеристик — режим работы
системы определяется исходя из угла поворота
рулевого колеса, а не из скорости движения
автомобиля.
Компания
Honda разработала механическую систему,
которая устанавливалась на автомобили Honda
Prelude. Главной особенностью этой системы
было то, что она выполнена полностью механической
с весьма непростой кинематической схемой.
Работала она следующим образом: при повороте
руля на небольшие углы задние колеса поворачиваются
в ту же сторону, что и передние, снижая
чувствительность и повышая надежность и
стабильность движения. При повороте баранки
на значительный угол задние колеса поворачиваются
в противоположную к передним колесам сторону,
обеспечивая высокую маневренность автомобиля.
Недостатки такой конструкции следуют из
ее технических характеристик — режим работы
системы определяется исходя из угла поворота
рулевого колеса, а не из скорости движения
автомобиля.
